- 課程詳情
- 學習評價(4)
- 上課校區(1)

簡介:
匯運視 機器視覺教育,隸屬于八方匯自動化教育集團,專注于 C#工控上位機、 運動控制卡、halcon 視覺軟件的系統教學!
理念:
目標讓電氣工程師也能學會 C#與 halcon 機器視覺,幫助電氣工程師向上開 拓進階技術,為中國智能制造領域培養更多視覺開發人才!
《C#上位機 + 運動控制卡 + halcon 視覺 項目開發班》
特點:
獨創的零跨度教學模式,適合PLC 電氣工程師出身人員;精心提煉的課程體系,讓機器視覺不再艱深晦澀; 豪華的實戰教學設備,貼近一線視覺項目,助你學習機器視覺之路無憂!
課程時長:
周二到周日,早 08:30-晚 20:30。
學習周期:
全日制學習約 60 天。
適合對象:
目前在做電氣工程師,有一定 PLC 編程基礎, 想要向上進階 C#上位機/機器視覺開發技術的人員。
基礎要求:
對 C#上位機、運動控制卡、halcon 視覺感興趣,想進階提升的電氣工程師。 電氣工程師進階上位機視覺,建議有一定的 ST 語言、結構化編程、網絡通信、 伺服軸運動控制基礎,且參與過中大型 PLC 編程項目。

【板塊一:C# 工控上位機編程】
《第一部分:C#語言基礎語法 + Winform 界面基礎》
一章節:從 PLC 編程基礎過渡到 C#編程基礎
1.1 Visual Studio 開發環境介紹
1.2 一個程序:“HelloWorld”
1.3 變量、常量概念(從 PLC 編程無縫過渡)
1.4 方法、形參、實參概念(從 PLC 編程無縫過渡)
1.5 基本數據類型概念(從 PLC 編程無縫過渡)
1.6 賦值、比較、運算等操作符概念(從 PLC 編程無縫過渡)
1.7 if、for、case 等流程控制語句概念(從 PLC 編程無縫過渡)
1.8 類、結構、對象實例化概念(從 PLC 編程無縫過渡)
1.9 字符串處理、拼接、截取、分解(從 PLC 編程無縫過渡)
1.8 總結 C#語言的編程風格與代碼層次
第二章節:從觸摸屏過渡到 Winform 界面編程
2.1 Winform 控件、屬性、布局(從觸摸屏無縫過渡)
2.2 事件響應、事件方法、事件綁定控件(從觸摸屏無縫過渡)
2.3 控件的分類與工具(從觸摸屏無縫過渡)
2.4 使用代碼操作控件的屬性(從觸摸屏宏指令無縫過渡)
2.5 編程小作業:齒輪比計算器、電工工具箱、工控查詢神器
第三章節:從 PLC 結構化編程過渡到面向對象 OOP 理論
3.1 數組、枚舉等復合數據類型(從 PLC 編程無縫過渡)
3.2 類的成員字段、方法、屬性、構造、靜態成員等
3.3 成員關鍵字 public、private、static、this 等
3.4 對象與類的實例化、對象的內存占用、類的引用本質
3.5 從 PLC 的 FB 封裝過渡到 C#的類
第四章節:.Net Frameworks 框架原理與編譯技巧
4.1 托管代碼、CLR、GC 回收機制
4.2 Debug 和 Release、X64 和 X86 的區分聯系
4.3 解決方案、項目、編譯與引用
4.4 代碼調試、斷電調試、變量監視與異常
4.5 try...catch 異常捕獲、異常處理機制
4.6 代碼的健壯性與程序運行故障排除

《第二部分:C#語言進階語法 + Winform UI 層架構設計》
一章節:集合、數據結構、泛型概念
1.1 List<T>、ArrayList、鍵值對與 Hashtable
1.2 裝箱、拆箱、字典的本質概念
1.3 隊列、表、堆棧等常用數據結構
1.4 泛型類、泛型方法與泛型集合
1.5 Table 結構的增、刪改查技巧
1.6 編程小作業:使用泛型集合實現 PLC 配方數據存取
1.7 編程小作業:使用字典實現簡易身份證匹配器
第二章節:Winform 深入、UI 架構設計
2.1 窗體對象、MDI 多窗體鑲嵌設計
2.2 UI 美化、無邊框設計、統一參數模板
2.3 Winform 通用控件、高級控件、自定義控件
2.4 Datagridview 控件與數據源綁定
2.5 編程小作業:使用 Winform 高級控件制作聊天小工具
2.6 編程小作業:使用 MDI 多窗體鑲嵌制作工業上位機界面模板
第三章節:多線程、委托、事件、PLC 掃描原理
3.1 線程類、線程對象、線程方法概念
3.2 Thread、Task 和 ThreadPool 線程池的性質
3.3 前臺線程、后臺線程與跨線程訪問控件
3.4 委托概念、委托定義順序與 lambda 表達式
3.5 事件 event 定義、訂閱觸發響應
3.6 使用 While 循環構造 PLC 掃描周期
3.7 線程的并發阻塞優先級參數傳遞
3.8 對線程進行 Winbug 底層追蹤
3.9 編程小作業:通過多線程實現簡易 PLC 掃描
《第三部分:C#多功能操作 + 數據庫技術》
一章節:C#操作文本文件、畫筆、CAD、office 等
1.1 txt、csv 文本文件操作
1.2 XML 文檔結構與存儲操作
1.3 Word、Excel、office 文件操作
1.4 對象序列化、反序列化操作
1.5 GDI+畫筆類庫、畫布、圖形操作
1.6 CAD 操作、打印與 CAD 坐標提取
1.7 編程小作業:實現配方產品記錄報警數據存儲
1.8 編程小作業:使用 GDI+制作自定義控件
1.9 編程小作業:導入 CAD 圖紙并生成坐標數據
第二章節:C#類庫操作技術
2.1 命名空間、程序集、using 的使用
2.2 動態鏈接庫 dll 的應用
2.3 程序集部署、config 配置文件操作
2.4 C# 特性標記與反射技術
2.5 C# 程序模塊化引用設計
第三章節:C#與 Windows 操作技術
3.1 鼠標與鍵盤的操作控制
3.2 計算機系統信息與硬件信息
3.3 磁盤、啟動與注冊表操作
3.4 進程管理、句柄管理與 EXE 文件
3.5 編程小作業:通用軟鍵盤界面制作
3.6 編程小作業:注冊表刪除工具
第四章節:SQLServer 數據庫應用
4.1 數據庫與 SQL 語言
4.2 SQLServer 查詢技術
4.3 數據表的增刪改查操作
4.4 鍵、約束、子查詢概念
4.5 規范化與數據庫關系圖
第五章節:AD***et 數據訪問技術
5.1 Access 與 SQLServer 數據庫的連接
5.2 數據適配器、數據集 DataSet 對象
5.3 Datagridview 綁定數據庫
5.4 LINQ 數據訪問技術
5.5 編程小作業:使用數據庫實現生產數據管理
附加課程:WPF 界面設計
附加課程:QT 與 MFC 拓展技術

《第四部分:C# OOP 設計模式 + 企業級項目實戰應用》
一章節:C#面向對象編程思想
1.1 類的封裝、繼承、多態性質概述
1.2 繼承權限、子類、里氏代換、分部類、密封類
1.3 虛方法、抽象類、接口實現、接口多態
1.4 類的設計思想、高內聚低耦合、職責明確
1.5 開閉原則、里氏原則、依賴倒置、接口隔離、合成復用、迪米特法則
第二章節:C#程序設計模式專題
2.1 設計模式之創建型模式概論
2.2 簡單工廠、工廠方法、抽象工廠、單例模式
2.3 使用反射+ 配置文件實現工廠方法
2.4 UML 類圖與類關系概述
2.5 結構型模式、行為型模式
2.6 鏈式編程與管道式編程模型
2.7 異步消息事件驅動機制
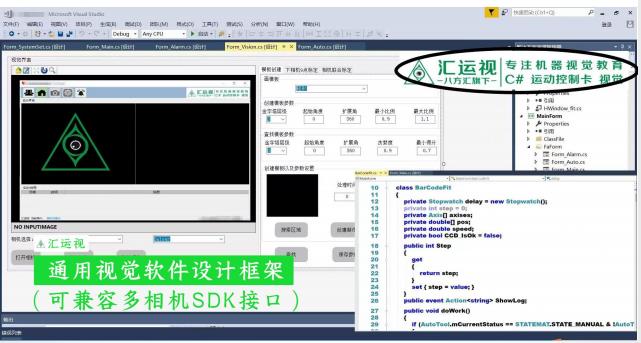
第三章節:匯運視 通用視覺+運動控制 項目框架搭建
3.1 企業級項目框架設計(UI+業務邏輯+鏈路+控制+數據+實體+圖像處理層)
3.2 通過配置文件+反射實現 PLC、運動控制卡、相機 SDK 的通用類調用
3.3 多任務并行處理(多線程并行采集、線程鎖模式、狀態機、消息隊列)
3.4 通用視覺處理+整機邏輯流程+數據分析 框架搭建
3.5 軟件的調試、故障排查、性能分析、效率優化
3.6 軟件的發布、打包、交付給最終用戶(包含設備調試實戰)

【板塊二:halcon 視覺開發】
《第一部分:halcon 環境與圖像處理基礎》
一章節:halcon 環境、編程概念
1.1 halcon 界面編輯、軟件安裝
1.2 變量、算子、圖像概念
1.3 tuple 數組定義、賦值、運算
1.4 子函數、函數參數、函數定義
1.5 控制流語句,if、for、while、switch
第二章節:圖像處理與形態學基礎
2.1 halcon 圖像獲取方式、連接相機
2.2 圖像變量 image、region、XLD
2.3 圖像數據結構與組成
2.4 圖像鄰域、連通域概念、二值化、灰度變換
2.5 圖像直方圖、增強、均衡化、高斯濾波
2.6 圖像幾何變換、鏡像、平移、反轉、縮放
2.7 形態學變換,腐蝕膨脹、開閉運算、頂底帽變換
2.8 區域分析、矩、凸性、特征選擇
2.9 Blob 分析(預處理、二值化、形態學、特征選擇、幾何定位)
第三章節:halcon 導出 C#/C++/VB.Net 代碼
2.1 halcon 導出 C#代碼
2.2 halcon 導出 C++代碼
2.3 halcon 導出 VB**et 代碼
2.4 編程小作業:使用 C#實現 halcon 的簡易聯合編程
《第二部分:條碼、二維碼與字符識別》
一章節:條碼檢測
1.1 條碼檢測相關算子、一維碼模型
1.2 使用 ROI 感興趣區域劃定目標
1.3 條碼檢測基本流程(預處理、創建、檢測、銷毀條碼模型)
1.4 條碼檢測方法擴展(校正、調整、擴展檢測、結果可視化)
1.5 應用案例:多種復雜一維碼檢測實戰應用(圓珠筆、光盤)

第二章節:二維碼檢測
2.1 halcon 支持的二維碼及其類型
2.2 二維碼模板自訓練識別
2.3 二維碼識別預處理技巧
2.4 多碼多線程同時識別技巧
2.5 應用案例:復雜場合下的二維碼檢測(光照不良、反光、曲面等情況)
第三章節:OCR 字符檢測
2.1 OCR 字符識別原理(分類器、特征向量、神經網絡)
2.2 OCR 檢測基本流程(預處理、設置、分割、訓練、求解)
2.3 OCR 助手的配置與交互
2.4 一維碼檢測與 OCR 聯合使用
2.5 應用案例:普通字符、環形字符、傾斜字符、漢字識別
《第三部分:模板匹配、形狀識別》
一章節:灰度與相關性匹配
1.1 基于灰度值模板匹配
1.2 歸一化相關系數(NCC)、圖像金字塔
1.3 匹配基本流程(預處理、創建模板、匹配模板、參數選擇)
1.4 基于相關性模板匹配
1.5 應用案例:匹配助手連接相機、配合圖像文件操作
第二章節:基于形狀匹配
2.1 基于邊緣輪廓模板(XLD)匹配
2.2 單模板、雙模板、正反面模板、不等比例模板
2.3 匹配基本流程(預處理、創建模板、匹配模板、參數選擇)
2.4 基于點匹配、組件匹配、描述符匹配、全局可變形匹配
2.5 應用案例:復雜場合下的模板匹配(變形、模糊、高噪聲、邊界處理)

《第四部分:坐標標定與尺寸測量》
一章節:一維測量與單目標定
1.1 一維測量原理、灰度投影、剖面求導
1.2 矩形、弧形、規則圖形測量原理
1.3 測量基本順序(構造測量對象、剖面線計算、局部極值)
1.4 世界坐標、相機坐標、像素坐標、物理坐標矩陣關系
1.5 內參矩陣、外參矩陣、坐標系 3D 姿態變換
1.6 應用案例:單攝像機實現物料實際尺寸測量和精度分析
第二章節:二維測量、標定、綜合應用
2.1 單目標定畸變矯正原理
2.2 雙目相機/多路相機使用圓形陣列、六邊蜂窩標定
2.3 二維測量邊緣檢測原理(離散卷積、圖像濾波、銳化)
2.4 XLD 輪廓擬合原理(擬合、最小二乘法)
2.5 應用案例:檢測實時定位(飛拍設備)卡尺測量跟隨
《第五部分:缺陷檢測、頻域與深度學習》
一章節:圖像頻域與傅里葉變換
1.1 傅里葉頻域變換原理解析
1.2 頻譜圖分析、頻域濾波技巧
1.3 離散傅里葉變換、標準正交基、相位頻譜表達
1.4 頻域+空域濾波與缺陷檢測應用
1.5 Laws 紋理特征提取與缺陷檢測應用
1.6 應用案例:邊緣凹陷、紙牌缺口、屏幕劃痕、電阻焊點檢測
第二章節:深度學習與卷積神經網絡
2.1 深度學習理論、halcon 搭建深度學習環境
2.2 深度學習基本流程(數據集預處理、模型訓練、模型驗證、模型測試)
2.3 CNN 卷積神經網絡原理模型
2.4 tensorflow 深度學習常用框架
2.5 基于語義分割的深度學習算法
2.6 應用案例:物料分類、光學分選、檢測口罩是否佩戴正確

【板塊三:項目聯合實戰】
《第一部分:C#+PLC+上位機通信》
一章節:Socket 與串口通信(從 PLC 編程無縫過渡)
1.1 C# Socket 類、對象與通信順序
1.2 Socket 客戶端、服務器編程與線程優化
1.3 C# serial 串口類與串口對象
1.4 編程小作業:通用串口/網口調試助手的制作
第二章節:Modbus 通信協議(從 PLC 編程無縫過渡)
2.1 C#上位機通信報文解析技巧
2.2 Modbus/RTU 通信協議的上位機實現順序
2.3 編程小作業:簡易 Modscan 調試助手的制作
第三章節:C#上位機 PLC 通信(從 PLC 編程無縫過渡)
3.1 通過協議報文方式實現 PLC 通信(MC/SLMP、3E 幀、S7 通信)
3.2 通過第三方組件方式實現 PLC 通信(MX、S7**et、HSL)
3.3 編程小作業:簡易 MES 系統的建立(三菱、西門子 PLC)
《第二部分:C#+視覺+運動控制卡》
一章節:雷賽/固高運動控制卡
1.1 運動控制卡硬件選型與物理配線
1.2 運動控制卡環境、引用順序
1.3 運動控制卡基本函數、SDK 調用
1.4 編程小作業:操作運動控制卡 demo 并獨立編寫
第二章節:運動控制底層封裝
2.1 使用多線程封裝 PLC 風格的運動控制類
2.2 面向大型項目的通用運動控制類封裝(使用繼承+反射機制)
2.3 運動控制類底層嵌入 匯運視 標準視覺框架中

《第三部分:C#+視覺+工業機器人》
一章節:機器人視覺基本原理
1.1 四軸機器人相機安裝多種方案
1.2 坐標系、工具坐標、法蘭中心概念
1.3 XYZ 平臺、UVW 平臺的區別和聯系
1.4 EPSON 機器人的通信操作(從 PLC 編程無縫過渡)
第二章節:四軸機器人(EPSON)視覺定位
2.1 機器人九點標定原理與操作
2.2 不同位姿下的矩陣補償運算
2.3 上下相機糾偏原理與操作
2.4 手眼標定理論、原理與操作實戰
2.5 歐拉角、姿態篩選消退法、四元數解算
2.6 項目實戰:雙相機+機器人對位貼合項目

-

*先生
2024.07.25已經上課了,課程滿意。
報名課程:plc項目聯合實戰
報名學費: ¥1000
-
八方匯高工培訓學院
地址:地鐵11號線福永站B出口華豐智谷產業園B棟
電話:400-029-0976 轉 **** 查看號碼
授課老師 更多
-

莊 勇
三菱plc培訓
精通西門子歐姆龍PLC;熟悉鋰電大型設備開發;曾獲得項目卓越貢獻獎;教學親切輔導有耐心;曾就職于國內知名新能源自動化公司,擔任高級電氣工程師;帶領過多個大型自動化項目設計團隊,擁有豐富的現場經驗;精通西門子、三菱、歐姆龍等多品牌高端大型PLC;授課風格細致、有耐心、學員親和力強,深受學員一致好評。 詳細
-

鐘偉升
工業自動化培訓
大公司項目經理出身;多次主導大型電氣項目;攻克過多個行業技術難題;擁有豐富設計經驗;從事自動化行業,擔任過大公司項目經理、電氣經理等職位;學識淵博,精通各品牌大型PLC、上位機、視覺/機器人編程;技術能力出色,主導攻克過多個行業技術難題,獲獎無數;授課風格深入淺出,條理清晰,讓學員擁有極大的信心學好PLC。 詳細
-

常晉綸
PLC培訓
從事自動化行業20載,為上千家企業系統研發改造做出杰出貢獻,積累了豐富的實戰經驗,見證了中國自動化行業的萌芽-成型-迅速發展的歷程,在自動化行業里一直被模仿但從未被超越。實戰派導師技術戰場的李云龍,講臺上的陳安之,獨創的快速編程方式,及時沒有做過任何技術的普工都能學會PLC編程。榮譽:《八方匯工程師商學院》戰略創始人之一中控自動化企業首席戰略編程顧問中國自動化協會會員深圳自動化商會會長中興通訊自動化技術開發部顧問珠海市鳳凰山隧道控制系統總架構師 詳細
關于我們 詳情

深圳八方匯企業管理咨詢有限公司為中控自動化工程有限公司旗下的子公司,授課導師擁有19年實戰項目開發經驗,顛覆行業傳統,為工程師“指路”。從0基礎到獨立做項目只需要短短的3-5周,高效、快捷到連你自己都覺得不可思議,實現普工/電工→電氣工程師→高級工程師→自主創業的人生蛻變升級。學校9位全職老師分階段授課, 其余8位工作人員協助老師全程為學員提供服務。首先一對一,接著一對多,再一對一,又一對多這樣循環,所有的課程20多天循環一次,一切只為把學員培養成能獨立做項目的電氣工程師而奮斗!課程采用創新無書本的教學模式,20%理論+ 70%實戰+ 10%工廠案例,以通俗易懂的大白話簡潔明了的授課,對PLC編程總燈泡等作形象的比喻;通過數臺不同種類的真實設備1臺1臺的攻關式的上機實戰,當您玩到最后一臺難的都玩轉了,您的編程思維還能差嗎?后期公司項目部這邊會不定期的帶著大家出去做項目提前適應工程師崗位流程,那您上班的時候還會恐慌嗎? 如果上班了遇到自己實在解決不了的問題導師上門服務協助您解答,那工程師的這條路走起來將更加順利。主講導師——常晉綸? ?八方匯工程師商學院董事長,從事電氣設備項目研發16年,見證了plc在中國的發展歷史,號稱“技術戰場上的李云龍、講臺上的陳安之”、 獨創的快速編程方式和授課模式,即使沒有做過任何技術的普工都能學會PLC編程,故被江湖“美譽”為自動化的傳銷員。?導師贈言: 八方匯從開始創立就不愿做一個為了培訓而培訓的平臺,我們存在的價值就是把每一位學員打造成電氣工程師。學院環境學院環境干凈大方,主打綠色清新系,科研氣息濃郁,一對一理論室3間、多媒體大教室2間、真實設備實戰室8間、電工實戰室2間、簡歷書寫打印室1間、項目討論室1間、技術科研室1間、學員休息室2間等2000多平米的教學場地,寬敞明亮,實戰設備通電了供學員實戰,絕不會存在“擺設”等做樣子的不可用設備,學習氛圍很濃,同學之間互幫互助。學習時間介紹上午:08:00-12:00下午:13:30-18:00晚上:19:00-21:30全職學習大概45天,接受能力快的1個月,慢的2個月或者時間更久,沒有時間限制。周末晚班大概3個月,所有的課程都體現在設備上,把學校的每臺設備獨立研發完就算告一段落,后期可以跟著項目部出去以電氣工程師的身份實踐,出去工作后終生提供技術支持。學院福利每3周左右就有一場面向社會的公開課,由在自動化行業從事了19年的常導師親自授課,將和大家分享他自己10多年來做項目的寶貴經驗,精彩萬分,機會難得,有興趣的朋友需找客服提前預約,名額有限。